Science > Physics > Scalars and Vectors > Scalars and Vectors
In this article, we shall study scalars and vectors, their characteristics.
Scalar Quantities or Scalars:
The physical quantities which have magnitude only and which can be specified by a number and unit only are called scalar quantities or scalars.
For e.g. when we are specifying time we may say like 20 seconds, 1 year, 24 hours, etc. Here we are giving magnitude only i.e. a number and a unit. In this case, the direction is not required.
More Examples of Scalars: Time, distance, speed, mass, density, area, volume, work, pressure, energy, etc.
Characteristics of Scalars:
- The scalar quantities have a magnitude only.
- The scalars can be added or subtracted from each other algebraically.
- When writing scalar quantity an arrow is not put on the head of the symbol of the quantity.
Vector Quantities or Vectors:
The physical quantities which have both the magnitude as well as the direction and which should be specified by both magnitude and direction are called vector quantities or vectors.
For e.g. when we are specifying the displacement of the body, we have to specify the magnitude and direction. Hence, displacement is a vector quantity.
More Examples of Vectors: Displacement, velocity, acceleration, force, momentum, electric intensity, magnetic induction, etc.
Note: A quantity is a vector quantity if and only if it has direction and magnitude and it obeys the rules of vector addition.
Characteristics of Vectors:
- The vector quantities have both a magnitude and a direction.
- The vectors cannot be added or subtracted from each other algebraically but we have to adopt a graphical method.
- When writing vector quantity an arrow is put on the head of the symbol of the quantity.
Pseudo Vectors:
The vectors associated with rotational motion are called pseudovectors. They are also referred as axial vectors. Their direction is along the axis of rotation.
Examples: angular displacement, angular velocity, angular acceleration, torque, etc.
Polar Vectors:
Vectors associated with linear directional effect are called polar vectors or true vectors. They have the starting point or the point of application.
Examples: Linear velocity, linear acceleration, force, momentum, etc.
Tensors:
It is a physical quantity which is neither scalar nor vector. They don’t have a definite direction. They may have different values in different directions. These quantities have magnitude and direction but they do not obey the rules of vector addition.
Examples: Moment of inertia, Stress, Surface tension, electric current, etc.
Symbolic Notation of Vectors:
A vector is represented by a letter with an arrowhead. Thus the vector A is represented as A. The magnitude of the vector is represented as |A| or simply A.
A vector can also be denoted by two letters. For e.g. PQ which means the starting point (tail) of the vector is point P and the endpoint of the vector (head) is at point Q. The direction of the vector is from point P to point Q
Representation of a Vector:
A line segment is drawn such that its length represents the magnitude of quantity to a suitable scale and in the given direction of the vector.
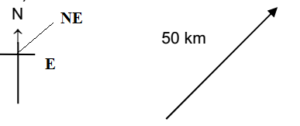
Example: A displacement vector of 50 km towards the northeast can be represented as follows.
- Select a proper scale, say 1cm = 10 km.
- Select a direction standard as shown.
- Draw a line segment of length 5 cm towards the north-east.
- Show arrow in the direction of the northeast.
Terminology of Vectors:
Unit Vector:
A vector having unit (one) magnitude is called a unit vector. The unit vector in the direction of vector Ā is denoted by  (a cap).
Notes:
- If  is a unit vector then |Â| = A = 1 .
- The unit Vectors along the positive directions of x, y and z-axes respectively are m î, ĵ, and
- Unit vector along vector Ā is given by  = Ā / |Ā |
Null or Zero Vector:
A vector having a zero magnitude is called a zero or Null Vector. Null or zero vector is denoted by ō (zero bar).
Notes:
- For the null vector, initial and the terminal points coincide.
- Any non-zero vector is called a proper vector.
Free Vector:
When there is no restriction to choose the origin of the vector, it is called a free vector.
Localized Vector:
When there is a restriction to choose the origin of the vector, it is called as a localized vector.
Reciprocal Vector:
The vector which has the same direction as that of Ā but has magnitude reciprocal to that of Ā is called as a reciprocal vector. It is denoted and given by

i.e. If AB = PQ then |AB| = |PQ| and AB || PQ
Collinear Vectors:
Vectors are said to be collinear if they lie along the same line or parallel to one and the same line. If two vectors are collinear, then each of them can be expressed as a scalar multiple of the other.
Like Vectors:
Vectors having the same direction are called like vectors.
Unlike Vectors:
Vectors having opposite directions are called, unlike vectors.
Coplanar Vectors:
Vectors are said to be coplanar if they lie in the same plane or parallel to one and the same plane.
Negative of a Vector:
Negative vector is a vector which has the same magnitude as that of the given vector but has the opposite direction to that of the given vector. Negative of vector Ā is denoted by – Ā.
AB = – BA
Equality of Vectors:
Two Vectors are said to be equal if and only if they have the same magnitude and the same direction. Thus equal vectors have the same length, the same parallel support, and the same sense. If any of these things are not the same, then the two vectors are not equal.
Concept of Position Vector of a Point:
Let A be any point in space and O be the fixed point in space then the position vector (P.V) of the point A w.r.t. to O is defined as the vector OA. The position vector of the point A w.r.t. fixed point O is denoted by A or a.
AB in terms of the position vector of its endpoints:
By triangle law, OA + AB = OB
∴ AB = OB – OA
∴ AB = B – A = (p.v of B) – (p.v of A)
Standard Unit Vectors or Rectangular Unit Vectors:
The unit vector along the positive x-axis is denoted by î , the unit vector along the positive y-axis is denoted by ĵ , the unit vector along the positive z-axis is denoted by .
If A is resolved into two vectors and along x-axis and y-axis respectively then by triangle law of vector addition
A = Ax + Ay
A = Ax î + Ay ĵ
The magnitude of the vector is given by
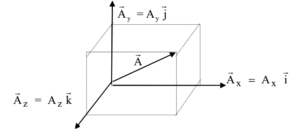
Three-dimensional system:
If A is resolved into three vectors Ax, Ay, Az along x-axis, y-axis and z-axis respectively then by polygon law of vector addition
A = Ax + Ay + Az
A = Ax î + Ay ĵ + Az k
The magnitude of the vector is given by
Notes:
- The component of the vector cannot have a magnitude greater than the vector itself.
- A vector is zero vector if all its components are zero.
Multiplication of Vector by a Scalar:
If A = Ax + Ay + Az is a vector and ‘m’ is a scalar, then we have
m A =m Ax +m Ay +m Az
Example – 01:
If P(3, -4, 5) is a point in space then find OP, |OP| and a unit vector along OP.
Solution:
OP = 3i – 4j + 5k
|OP| = √(3)²+ (-4)²+ (5)²
= √9+ 16+ 25 = √50 = 5√2 unit
Unit vector along OP = OP/|OP| = (3i – 4j + 5k)/ 5√2
Example – 02:
- If A(1, 2, 3) and B(2, -1, 5) are two points in space then find AB, |AB| and a unit vector along AB.
Position vector of point A = a = OA = i + 2j + 3k
Position vector of point B= b = OB = 2i – j + 5k
AB = b – a = (2i – j + 5k) – (i + 2j + 3k)
∴ AB = 2i – j + 5k – i – 2j – 3k = i – 3j + 2k
|AB| = √(1)²+ (-3)²+ (2)²
= √1+ 9+ 4 = √14 unit
Unit vector along AB = AB/|AB| = ( i – 3j + 2k )/ √14